サーボ調整の目的
サーボ調整の目的は、サーボの名前のとおり上位PLCからの指令に対して正確に動作できるようになることです。お客様が求める精度およびサイクルタイムを満たすようにサーボ調整を行います。そのためには、サーボドライバの構成やどのような制御を行っているのかを知ることが必要です。内部の構造を知ることでサーボのどのパラメータをいじればいいのかが分かります。
サーボ調整のゴールは、あくまでもお客様が求める整定時間やサイクルタイムに収まることです。装置のベストを求めるとなると、何通りもあるパラメータの最適解を見つけることになり、ほぼ不可能です。したがって、事前に要求の精度や整定時間、サイクルタイムをお客様からヒアリングし、調整前に目標を明確にすることが必要です。
サーボドライバの構成
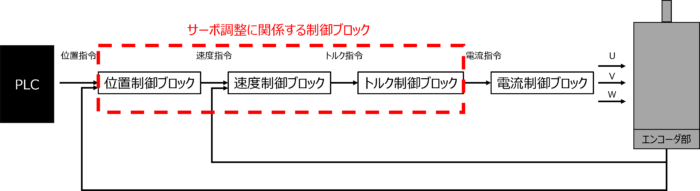
サーボ調整はサーボドライバのサーボパラメータを調整します。サーボドライバは、3つの制御ブロックで構成されています。位置制御、速度制御、トルク制御の3つで構成されており、これらに関わるパラメータを調整することがサーボ調整となります。
制御部、エンコーダ通信部、電力変換部から構成されます。サーボ調整では、赤枠部に関わるパラメータを調整します。
制御部(速度・位置ループ)の構成
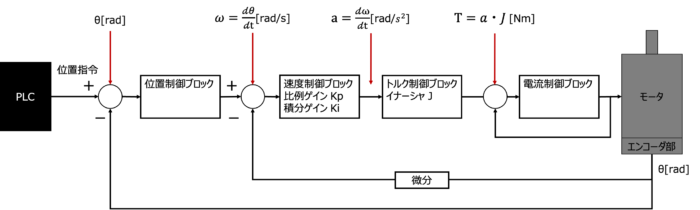
サーボドライバの制御部の構成は以下のとおりです。回転系の物理式なので、トルクは角加速度(α)×イナーシャ(J)で計算されます。位置制御ブロック、速度制御ブロック、トルク制御ブロックの順に直列に接続されています。各ブロックのパラメータのバランスは、制御の性能や安定性に大きな影響を与えます。
まずはおおまかに制御の流れを理解しましょう!
制御の流れ
- PLCからの指令パルスをラジアンに変換して位置制御ブロックに渡し、位置制御ゲインを掛けます
- 速度制御ブロックでは、指令速度と実速度の差分に対して速度制御ゲインと積分制御を使った制御を行っています
- 速度制御ゲインをかけた後にイナーシャをかけます。そうすると加速度が出るのでトルクが算出されます。算出されたトルクは電流制御の方にトルク指令という形でモータに渡しています。
- エンコーダからパルスからラジアンに変えて微分して速度を求めます。また変換したラジアンは位置制御の方にフィードバックします。
以下に各ブロックに関連のあるパラメータについて詳しく説明します。
各ブロックのパラメータについて
- 位置制御ブロック
・位置制御ゲイン(Position Control Gain): 指令位置と現在位置の差=位置偏差を元に制御信号を調整するパラメータです。位置制御ゲインが低いと立ち上がり、立ち下がりがゆるやかで位置決めの時間が長くなる。位置制御ゲインが高いほどサーボの追従性がよくなり位置決め速度が上がるが、高くしすぎるとオーバーシュートして乱調となったり、ハンチングを起こしたりします。 - 速度制御ブロック
・速度制御ゲイン(Velocity Control Gain): 速度制御ループのゲインで、目標速度に対してどれだけ追従するかを調整するパラメータです。速度制御ゲインが高いと速度応答性が上がりますが、振動が発生しやすくなります。 - トルク制御ブロック
・トルクフィルタ(Torque Filter): サーボモーターのトルク制御信号をフィルタリングするためのフィルタです。ノイズや振動を除去し、安定性を向上させる役割があります。
・ノッチフィルタ(Notch Filter): 特定の周波数帯域の振動を抑制するためのフィルタです。振動に対する特定の周波数成分の除去に使用され、安定性や滑らかな動作を向上させる効果があります。
サーボ調整方法
サーボ調整は、主に負荷イナーシャ(イナーシャ比)と剛性(位置制御ゲイン、速度制御ゲイン)を推定することです。
また、フィルタもサーボ調整の重要な要素です。トルクフィルタやノッチフィルタなどのフィルタを適切に設定することで、ノイズや振動の除去、共振の抑制、応答特性の調整を行うことができます。
各制御ブロックは直列に接続されており、電流制御では電流制御側で、速度制御では速度制御側で、位置制御では位置制御側でマイナーループを持っています。位置制御ゲイン、速度制御ゲイン、トルクフィルタ、ノッチフィルタのバランスが大切です。これらのパラメータのバランスが悪いと振動が発生してしまいます。
各パラメータのバランスに関して調整する時に目安となるものはあるのかな?
速度制御ゲインを基準とすると、位置制御ゲインは速度制御ゲインの1/4、トルクフィルタ・ノッチフィルタは速度制御ゲインの7倍となるようなバランスが良いんだ!あくまでも目安だけどね!
速度応答周波数
サーボ調整時の重要な評価指標として速度応答周波数があります。速度応答周波数は、速度指令を正弦波に変化させた場合において、モータ速度の振幅が指令値の振幅の-3dBになる周波数を示す指標です。サーボシステムに与えられた速度指令に対して、モーターがどれだけ速く追従できるかを示す周波数帯域を指します。
速度応答周波数は、一般的に周波数応答解析やスペクトル解析を通じて評価されます。一般的な手法としては、入力信号として正弦波を与え、その周波数を徐々に変化させて速度応答を観測します。速度応答周波数は、モーター速度の振幅が指令値の振幅に対して減衰していく周波数帯域として定義されます。
速度応答周波数の高い値は、サーボシステムが高速かつ正確に速度指令に追従することを示します。一方、速度応答周波数が低いと、モーターの速度応答が遅くなり、追従性や応答速度が低下する傾向があります。
サーボ調整や制御系のチューニングにおいては、適切な速度応答周波数を設定することが重要です。適切な速度応答周波数を選択することで、目標速度への追従性や応答速度を最適化し、制御系の性能を向上させることができます。また、速度応答周波数は制御系の安定性や振動抑制の観点からも考慮されます。
機械共振がある場合
機械共振は、機械システムが特定の周波数で共振し、振動や不安定な動作を引き起こす現象です。これに対して、ノッチフィルタは、共振が起きる特定の周波数帯域のゲインを下げる効果を持つフィルタです。この特性により、ノッチフィルタは特定の周波数成分を抑制することができます。しかし、ノッチフィルタを使用すると、周波数の低い側で位相が悪化するというデメリットがあります。




コメント